A Bounding Volume Hierarchy for Computing Generic Signed Distance Fields to Mesh Objects

by Martin Cavarga

My last post ended with a problem statement: how would we generate a distance field around arbitrary mesh objects? One can easily come to a conclusion that the vast majority of objects used in 3D modeling are not geometric primitives or their Boolean combinations. In practice, we can easily start with a point-cloud model (perhaps from a 3D scan or photogrammetry) upon which a triangulation algorithm is applied. Having no other information than a vertex array and connectivity information (vertex indices) we need to sample the space surrounding this mesh object so that each sampling point locates the closest mesh triangle and computes a point-to-triangle distance.
The easiest way to approach this problem is to “brute-force” the computation for the entire mesh:
void Grid::BruteForceDistanceField(Geometry* geom)
{
int ix, iy, iz, i, gridPos;
Vector3 p = Vector3(); Tri T;
Vector3 o = m_BBox.min; // origin
uint nx = m_Nx - 1;
uint ny = m_Ny - 1;
uint nz = m_Nz - 1;
double dx = m_Scale.x / nx;
double dy = m_Scale.y / ny;
double dz = m_Scale.z / nz;
double result_distSq, distSq;
for (iz = 0; iz < m_Nz; iz++) {
for (iy = 0; iy < m_Ny; iy++) {
for (ix = 0; ix < m_Nx; ix++) {
result_distSq = DBL_MAX;
p.set(
o.x + ix * dx,
o.y + iy * dy,
o.z + iz * dz
);
for (i = 0; i < geom->vertexIndices.size(); i += 3) {
T[0] = &geom->uniqueVertices[geom->vertexIndices[i]];
T[1] = &geom->uniqueVertices[geom->vertexIndices[i + 1]];
T[2] = &geom->uniqueVertices[geom->vertexIndices[i + 2]];
distSq = GetDistanceToATriangleSq(t, &p);
result_distSq = distSq < result_distSq ? distSq : result_distSq;
}
gridPos = m_Nx * m_Ny * iz + m_Nx * iy + ix;
m_Field[gridPos] = sqrt(result_distSq);
}
}
}
}
The above (C++) method belongs to a Grid object (note that we use using uint = unsigned int for shorter identifiers). As we can see: it needs to run across the entire scalar grid (all sampling points) and for each point also accross all mesh triangles (vertexIndices with stride = 3). Lines 31 and 34 present the largest bottleneck – a triangle distance function with many conditions, and a single ternary condition updating the squared distance value result_distSq whenever a closer triangle is encountered. These two commands might not seem like much on their own, but when perfomed 



In fact, meshes with 

When a sampling point is located near some part of a mesh, it is utterly useless to compute distances to triangles that are “on the other side” of the mesh. One might think that the concept of “closeness” to some triangles of the mesh is inseparable from the distance we intend to compute, but it turns out that there is another set of approaches utilizing a “friend” of programmers who want to accelerate a process handling arbitrarily large amounts of data – a binary tree.
Bounding Boxes and Binary Space Partitioning
An axis-aligned bounding box is an object described by two points 

three.js implementation of this object contains almost all necessary functionality. The only exceptions are some methods implemented and used in my version.
3D regions can be partitioned into oriented bounding boxes as well. These are oriented in space so that they fit the geometric data they contain (points, lines, triangles, primitives…). However, their construction requires some additional preprocessing, which would slow down the development of a fully functional distance field generator. Axis-aligned min-max boxes provide a cheap way to compute intersections between them and primitive data (points, lines, triangles…), and are easy to construct.
In order to compute a bounding box of an arbitrary mesh object, we just need the vertex information, in particular: traversing the vertex array and incrementing/decrementing default minimum and maximum values for each vertex coordinate. Taking a 1000 triangles we need to perform 3000 min-max operations (at worst) for each vertex, and this amount increases linearly with more data. We need to perform this only once to obtain the bounding box of our mesh geometry.

Similarly to how search engines compose search queries based on the degree of matching to the searched string, we can utilize the computationally cheap process of “localizing” geometric primitives in a hierarchy of bounding boxes. Introducing: binary space partitioning.
Regardless of whether we use axis-aligned bounding boxes (AABB’s) or other volume units as nodes, the fundamental idea is to start with a root node represented by the largest available bounding volume, and splitting it into two sub-volumes in each recursive step. As we can see in the above image: nodes can contain triangles (or possibly different primitives: edges, points, etc.). However, whenever a node contains primitives, it is by definition a leaf node (i.e.: at the bottom of the tree, e.g.: nodes 

Let us consider the computational costs of:
- constructing a search tree – To create a tree one has to insert
elements (primitives). The insertion cost is on average:
to worst case:
meaning that average construction cost is
and worst case is
(all primitives clumped together at one position).
- searching for the first matching result – The resulting tree can be degenerate, i.e.: a linked list with all primitives contained in the single leaf node at the end. This makes the worst case for searching
Balancing the resulting tree or implementing it as self-balancing can minimize tree height, making search queries faster. Since we intend to use this tree only once, node deletion operation is not necessary. We can summarize the above costs in the following table:
| operation | best case | average | worst case |
insert a leaf node containing  elements elements |  | | |
| insert (a necessary amount of) leaf nodes containing elements (full tree construction) | | | |
| search for an element contained in a leaf node with elements | | | |
The total cost for finding the closest triangle to a given point is fully described by the last row in the above table.
The remaining question is: how to partition bounding volumes every time they are to be split?
Leaf Conditions
The implications of binary space partitioning are that the workload of mesh primitives (triangles) is significantly decreased. Only the relevant (closest) triangles are considered. However, given the amount of configurations a polygon soup can be found in, the situation can easily devolve into a scenario close to the worst case if we split bounding volumes arbitrarily. Another important condition is the stopping criterion, i.e.: when to stop splitting.
We can denote the conditions under which an AABB node is no longer allowed to be split as “leaf conditions“. In my implementation they are summarized by the following inequality

which quantifies the balance between the number of left node triangles 



The search for the optimal split position is the largest bottleneck for the tree’s construction. The axis-aligned splitting direction should adapt to the distribution of primitives within each box, so for splitting direction we choose the longest split axis for each node splitting step. Splitting the node’s bounding box in half would be insufficient for meshes with large concentrations of primitives (triangles) in some areas since it would take longer for nodes to reach leaf conditions. And when nodes reach leaf conditions, the search query would need to handle nearly all triangles of the triangle soup when it reaches such “problematic” leaf node.
We can use a variant of a technique called surface area heuristic (SAH) which minimizes a cost function:

where 







The cost function 
![[b_{\min}, b_{\max}]](https://s0.wp.com/latex.php?latex=%5Bb_%7B%5Cmin%7D%2C+b_%7B%5Cmax%7D%5D+&bg=000000&fg=ffffff&s=2&c=20201002)


On most modern machines, the adaptive resampling approach allows for parallel processing of multiple split positions using 32-bit (or even 64-bit for some machines) SIMD registers.
Node Splitting
The resulting recursive node-splitting algorithm can be summarized with pseudocode as:

To account for floating point errors, each bounding box 

Construct method:
void AABBNode::Construct(std::vector<uint>* primitiveIds, uint depthLeft)
{
if (depthLeft == 0 || primitiveIds->size() <= 2) {
m_PrimitiveIds = *primitiveIds;
FilterPrimitives();
return;
}
// choosing the longest split axis seems to be faster
if ((m_BBox.max.x - m_BBox.min.x) > (m_BBox.max.y - m_BBox.min.y) && (m_BBox.max.x - m_BBox.min.x) > (m_BBox.max.z - m_BBox.min.z)) {
m_Axis = 0;
}
else if ((m_BBox.max.y - m_BBox.min.y) > (m_BBox.max.z - m_BBox.min.z)) {
m_Axis = 1;
}
else {
m_Axis = 2;
}
std::vector<uint> leftPrimitiveIds = {};
std::vector<uint> rightPrimitiveIds = {};
// classify this node's primitives (which should go to the left and right child) & find split position
m_SplitPosition = GetSplitPosition(*primitiveIds, &leftPrimitiveIds, &rightPrimitiveIds);
const bool stopBranching = !HasEnoughBranching(leftPrimitiveIds.size(), rightPrimitiveIds.size(), primitiveIds->size());
if (stopBranching) {
m_PrimitiveIds = *primitiveIds;
FilterPrimitives();
}
else {
if (leftPrimitiveIds.size() > 0) {
Box3 bboxLeft = m_BBox;
bboxLeft.max.SetCoordById(m_SplitPosition, m_Axis);
m_Left = new AABBNode(&leftPrimitiveIds, bboxLeft, m_Tree, depthLeft - 1, this);
if (m_Left->m_PrimitiveIds.empty() && m_Left->m_Left == nullptr && m_Left->m_Right == nullptr) {
m_Left = nullptr;
}
}
if (rightPrimitiveIds.size() > 0) {
Box3 bboxRight = m_BBox;
bboxRight.min.SetCoordById(m_SplitPosition, m_Axis);
m_Right = new AABBNode(&rightPrimitiveIds, bboxRight, m_Tree, depthLeft - 1, this);
if (m_Right->m_PrimitiveIds.empty() && m_Right->m_Left == nullptr && m_Right->m_Right == nullptr) {
m_Right = nullptr;
}
}
}
}
Implemented for AABBNode struct:
struct AABBNode {
AABBNode* m_Parent = nullptr;
AABBNode* m_Left = nullptr;
AABBNode* m_Right = nullptr;
// ptr to an object containing the root AABBNode and raw primitives (triangles, edges, vertices)
AABBTree* m_Tree = nullptr;
Box3 m_BBox;
std::vector<uint> m_PrimitiveIds = {};
uint m_Axis = 2; // (X, Y, Z) -> (0, 1, 2)
float m_SplitPosition = 0.0f;
// constructor
AABBNode(std::vector<uint>* primitiveIds, Box3& bbox, AABBTree* tree, uint depthLeft = MAX_DEPTH, AABBNode* parent = nullptr);
// filters only primitives which actually intersect m_BBox
void FilterPrimitives();
// classifies this node's primitives (which should go to the left and right child) & returns (optimal) split position
float GetSplitPosition(std::vector<uint>& primitiveIds, std::vector<uint>* out_left, std::vector<uint>* out_right);
// returns true if this node has no children
bool IsALeaf();
// returns true if this node contains primitive ids and has no children
bool IsALeafWithPrimitives();
};
// leaf condition for AABBNode
bool HasEnoughBranching(size_t nLeftPrims, size_t nRightPrims, size_t nPrims) {
return nLeftPrims + nRightPrims < 1.5f * nPrims;
}
The implementation of GetSplitPosition method can be user-controlled or chosen automatically between a version which uses SIMD registers and a purely sequential version.
The m_PrimitiveIds array contains indices to primitives (triangles, edges, or vertices) so they do not need to be copied with their coordinates for each node. Aside from the root AABBNode, the tree object m_Tree contains raw primitives indexed by m_PrimitiveIds.
Intersection and Distance Queries
By implementing the above tree, we are free to proceed to the next step: implementing desired search queries. The two obvious candidates are:
- box-primitive intersection
- closest primitive to a point
These will need to be implemented in the tree object AABBTree (a pointer to which is stored in each AABBNode as m_Tree). The first query can be carried out via method:
bool AABBTree::BoxIntersectsAPrimitive(Box3* box)
{
std::stack<AABBNode*> stack = {};
stack.push(m_Root);
AABBNode* item;
Vector3 center; Vector3 halfSize;
box->setToCenter(¢er); // writes box center to center
box->setToHalfSize(&halfSize); // writes box half-size to halfSize
while (stack.size()) {
item = stack.top();
stack.pop();
if (item->IsALeaf()) {
for (auto pId : item->m_PrimitiveIds) {
if (GetPrimitiveBoxIntersection(m_Primitives.at(pId), ¢er, &box->min, &box->max, &halfSize, 0.0f)) {
return true;
}
}
}
else {
if (item->m_Left && box->intersectsBox(item->m_Left->m_BBox)) {
stack.push(item->m_Left);
}
if (item->m_Right && box->intersectsBox(item->m_Right->m_BBox)) {
stack.push(item->m_Right);
}
}
}
return false;
}
where GetPrimitiveBoxIntersection is specifically handled for each type of primitive:
bool GetPrimitiveBoxIntersection(Primitive& primitive, Vector3* boxCenter, Vector3* boxMin, Vector3* boxMax, Vector3* boxHalfSize, double offset)
{
if (primitive.vertices.size() == 1) {
return (
(primitive.vertices[0]->x >= boxMin->x && primitive.vertices[0]->x <= boxMax->x) &&
(primitive.vertices[0]->y >= boxMin->y && primitive.vertices[0]->y <= boxMax->y) &&
(primitive.vertices[0]->z >= boxMin->z && primitive.vertices[0]->z <= boxMax->z)
);
}
else if (primitive.vertices.size() == 2) {
return GetEdgeBoxIntersection(primitive.vertices, boxMin, boxMax);
}
else if (primitive.vertices.size() == 3) {
Tri t = new Vector3*[3];
t[0] = primitive.vertices[0];
t[1] = primitive.vertices[1];
t[2] = primitive.vertices[2];
return GetTriangleBoxIntersection(t, boxCenter, boxHalfSize);
delete[] t;
}
return false;
}
A better way of implementing this method would be to pass it as a lambda expression into BoxIntersectsAPrimitive with implementation specific for the primitive type. The GetEdgeBoxIntersection and GetTriangleBoxIntersection methods have been optimized and are inspired by multiple sources.
The AABBTree object can be used for distance queries as well, for example:
AABBNode* AABBTree::GetClosestLeafNode(Vector3& point)
{
std::stack<AABBNode*> stack = {};
stack.push(m_Root);
AABBNode* item; AABBNode* nearNode; AABBNode* farNode;
bool leftIsNear;
while (stack.size()) {
item = stack.top();
stack.pop();
if (item->IsALeaf()) {
return item;
}
else {
leftIsNear = point.getCoordById(item->m_Axis) < item->m_SplitPosition;
nearNode = item->m_Left;
farNode = item->m_Right;
if (!leftIsNear) {
nearNode = item->m_Right;
farNode = item->m_Left;
}
if (nearNode) {
stack.push(nearNode);
}
else if (farNode) {
stack.push(farNode);
}
}
}
return nullptr;
}
The closest leaf node can then provide a small number of primitives which can easily be compared for distance.
A modification of BoxIntersectsAPrimitive is a method that returns all primitives in a box:
void AABBTree::GetPrimitivesInABox(Box3* box, std::vector<uint>* primIdBuffer)
{
if (!primIdBuffer->empty()) primIdBuffer->clear();
std::stack<AABBNode*> stack = {};
stack.push(m_Root);
AABBNode* item;
while (stack.size()) {
item = stack.top();
stack.pop();
if (item->IsALeaf()) {
for (auto pId : item->m_PrimitiveIds) {
primIdBuffer->push_back(pId);
}
} else {
if (item->m_Left && box->intersectsBox(item->m_Left->m_BBox)) {
stack.push(item->m_Left);
}
if (item->m_Right && box->intersectsBox(item->m_Right->m_BBox)) {
stack.push(item->m_Right);
}
}
}
}
The average complexity of GetPrimitivesInABox is AABBTree. The same holds for GetClosestLeafNode even though measured times may differ due to specific operations.

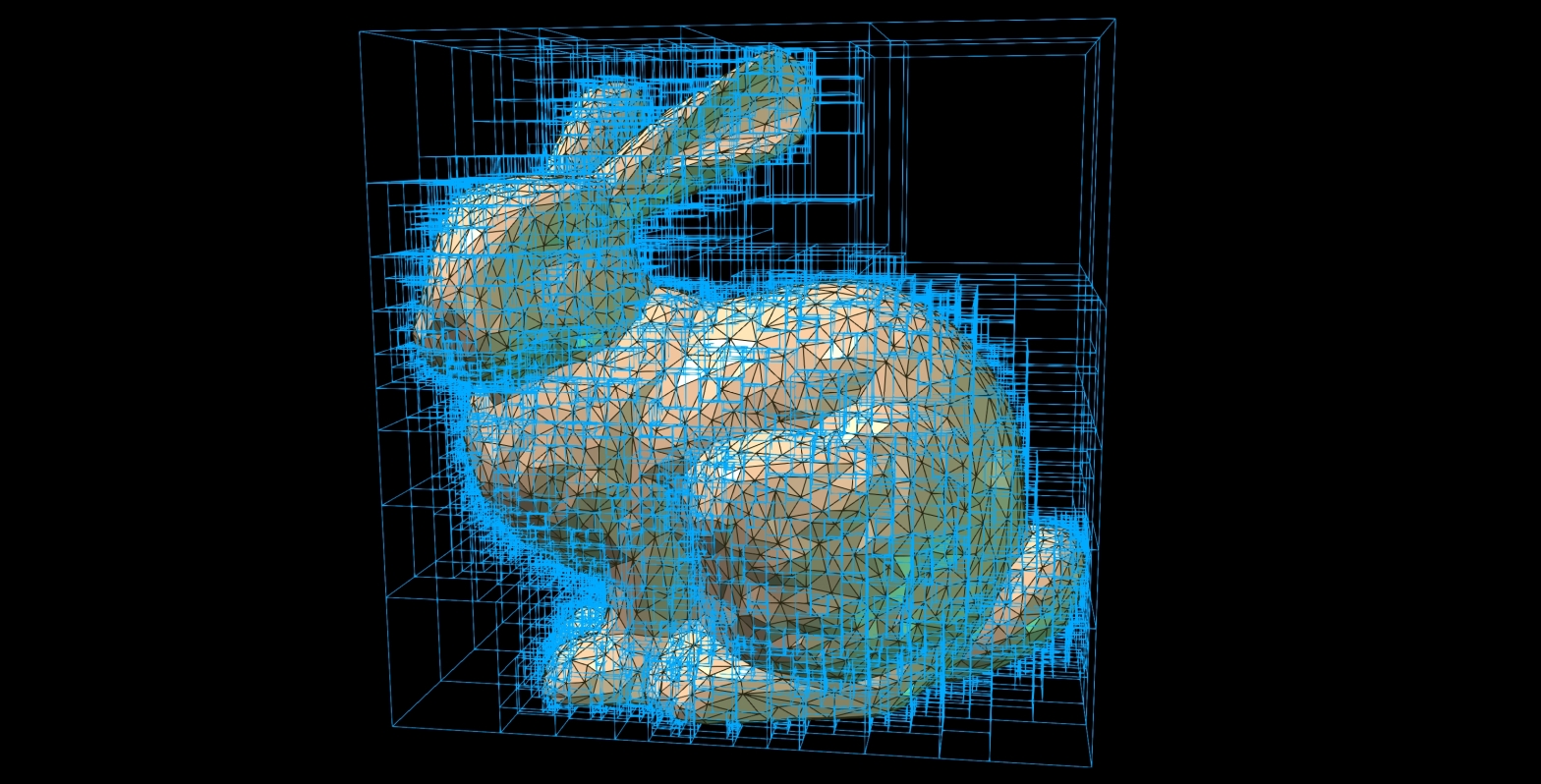
AABBNode bounding boxes, with (left) all nodes, and (right) just leaf nodes.
Final Remarks
The construction of AABBTree object for the Stanford Bunny model takes, on average, 0.05 seconds on my machine. However, this implementation has no balancing or additional optimization (besides using SIMD registers). Still compared to other subroutines used in my implementation of an SDF generator the construction of AABBTree takes only about 4% of computation time for scalar grid resolution 
The resulting AABBTree is later used for accelerated intersection query with BoxIntersectsAPrimitive and obtaining relevant (close) primitives via GetPrimitivesInABox. These methods will later be used when constructing an Octree object refined at volume nodes intersecting the mesh geometry.
All things considered, I chose my own implementation specific to SDF computation rather than a working implementation with a lot of functionality I wouldn’t use (e.g.: CGAL). This means that the overall design was meant for academic purposes, and is still likely very flawed, requiring additional iterations for improvement. However, I believe that this article may guide researching developers who are new to the underlying procedures of collision detection and accelerated distance querying.
Oooo, velmi dobre ! Dňa pi 27. 8. 2021, 16:50 Martin Cavarga napísal(a): > mshgrid posted: ” A Possible Resolution…

very nice publish, i definitely love this website, keep on it